IJPEM
Parametric Design Optimization of a Tail Mechanism Based on Tri-Wheels for Curved Spoke-Based Stair-Climbing Robots
계단등반로봇을 위한 삼각바퀴 기반의 꼬리 메커니즘 최적화
서태원/한양대학교
- 나선형 스포크 기반의 계단등반로봇이 계단 등반 시 가지는 한계점을 해결하기 위해 선행 연구에서 여러 형태의 꼬리 메커니즘을 연구하였으며, 삼각바퀴 기반의 꼬리 메커니즘이 우수한 성능 향상을 보여줌
- 다양한 크기의 계단과 여러 계단 등반 속도에서도 우수한 성능 향상을 보일 수 있도록 Taguchi 방법론을 활용하여 나선형 스포크 기반의 계단등반로봇을 위한 삼각바퀴 기반의 꼬리 메커니즘의 견실 최적 설계를 수행함
- 이를 통해 구동휠의 슬립 없이 나선형 스포크 기반의 계단등반로봇이 안정적으로 계단 등반을 할 수 있도록 하는 최소요구마찰계수를 최소화함
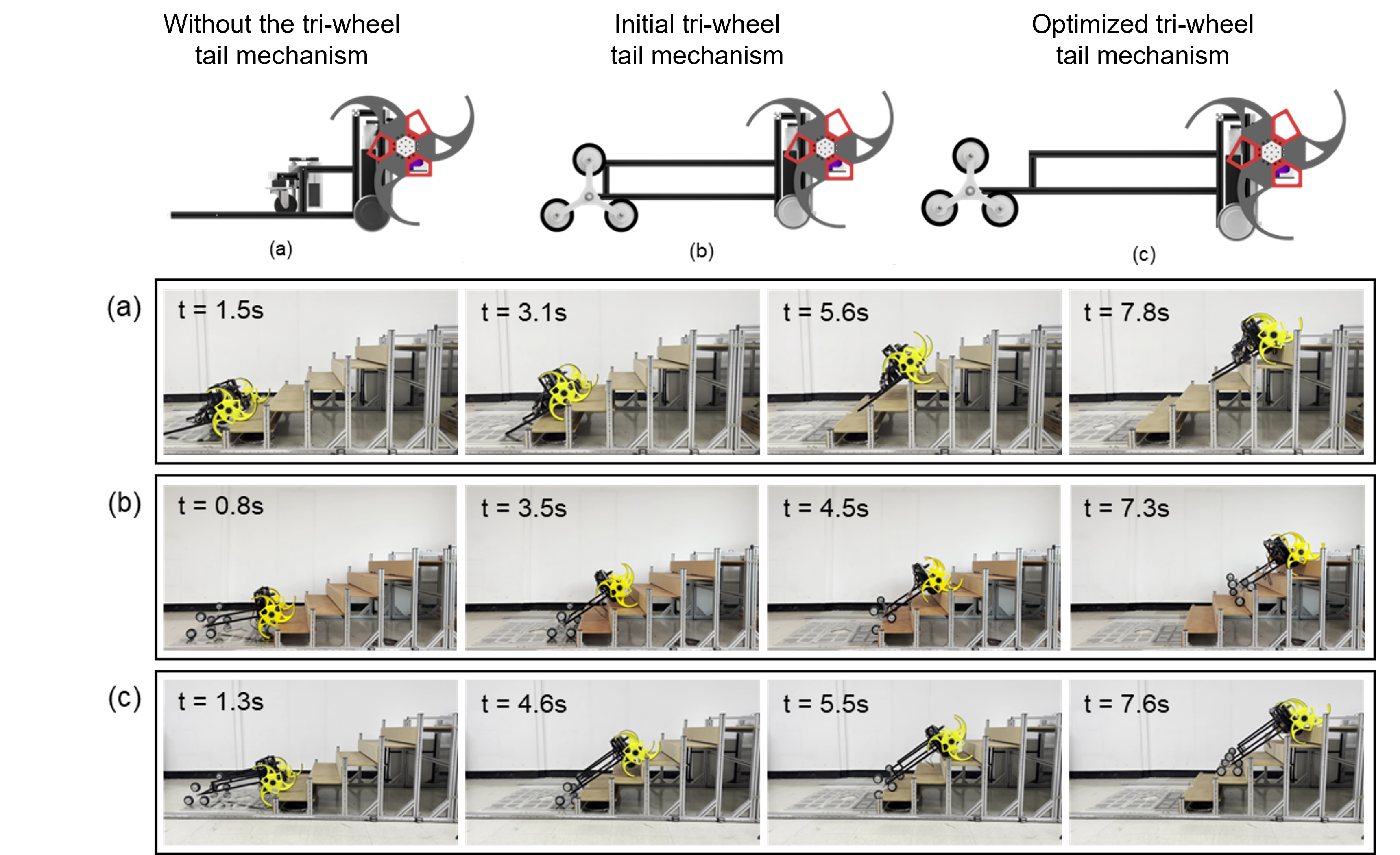
- 최적화 설계 결과를 바탕으로 제작한 프로토타입 로봇의 계단등반실험을 통해 성능 향상 정도를 검증 확인함