IJPEM
Prediction of Tool Tip Dynamics Through Machine Learning and Inverse Receptance Coupling
물리기반 학습 기법(Physics-guided ML)을 활용한 공구 동특성 예측에 관한 연구
남은석/한국생산기술연구원
- 절삭가공에서 공구 동특성은 가공 안정성 및 생산성 향상을 위한 가공조건 최적화에 필요한 정보임
- 공구 끝단의 동특성은 실험이나 FE 시뮬레이션을 통해 구하는 것이 일반적이나 휴먼 에러나 시뮬레이션 난이도가 높은 한계가 있음
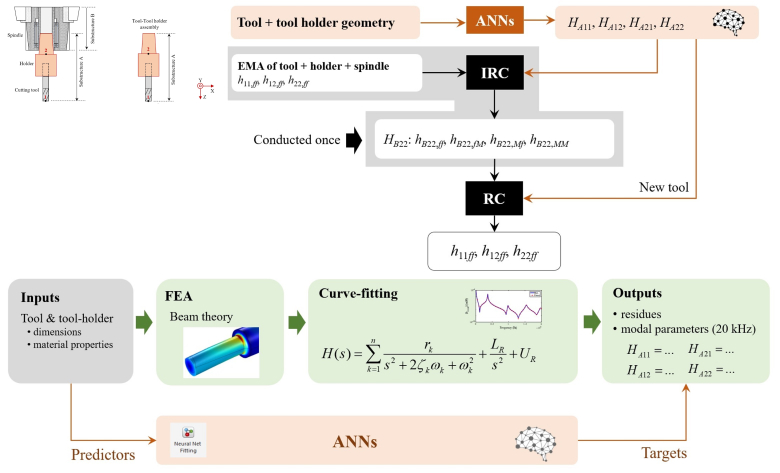
- 시뮬레이션 복잡성으로 인한 예측 시간 단축을 위해 Receptance coupling 기법과 기계학습을 접목한 물리기반 학습 기법을 제안함
- 제안한 학습 모델을 이용하여 기존 RC-FE 시뮬레이션에 비해 평균 약 96% 정확도로 공구 동특성을 예측할 수 있었음