IJPEM
FleTbot, A Flexible Thermoplastic Polyurethane Applied Tri-spiral Spoke Wheel Robot
유연한 폴리머 바퀴를 이용하여 안정적인 주행과 장애물 극복 능력을 동시에 달성
서태원/한양대학교
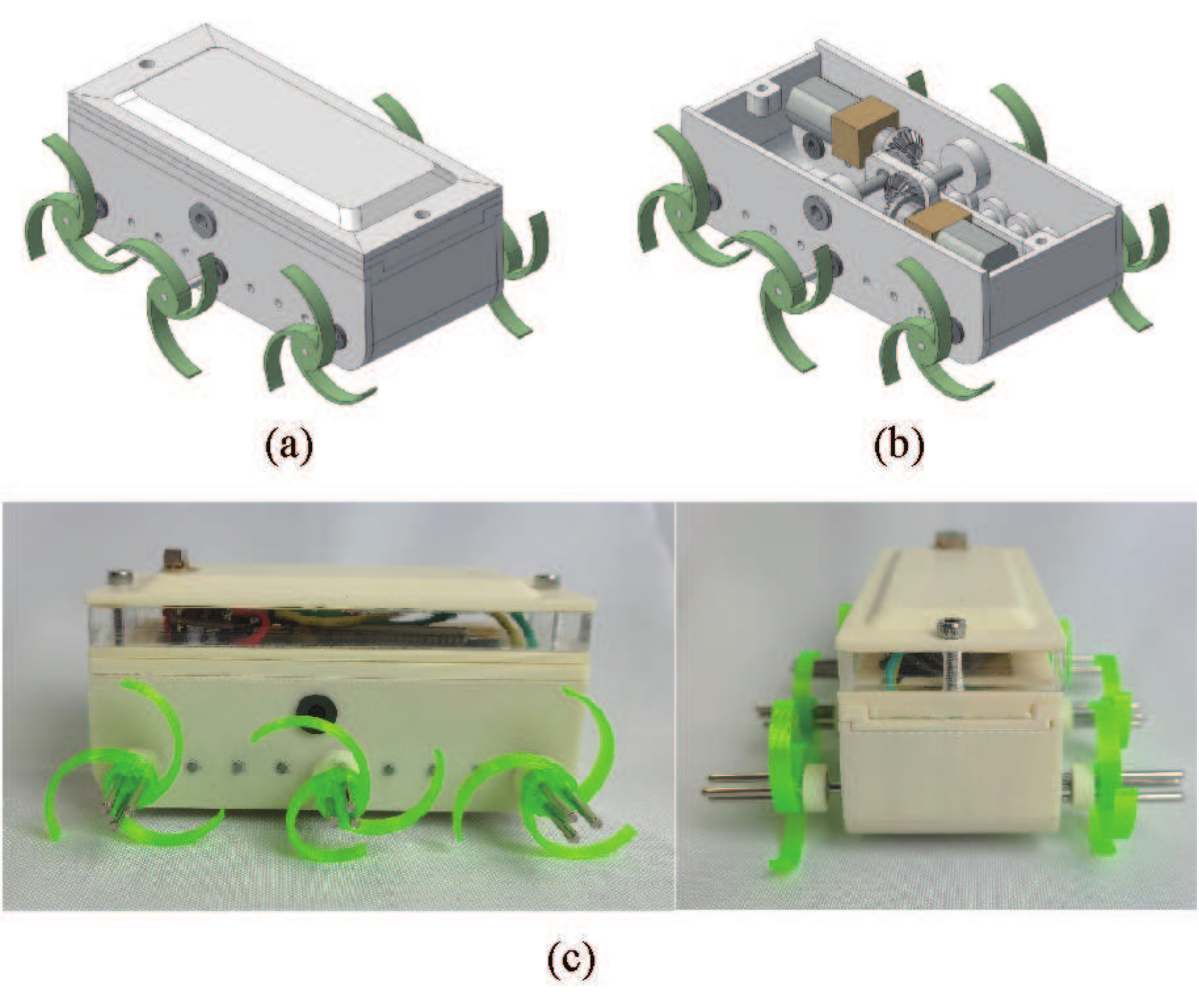
- 한양대 서태원 교수와 김경민 연구원은 유연한 폴리머를 이용한 새로운 바퀴 구조를 기반으로 한 로봇을 설계, 제작 하였음
- 제안된 새로운 바퀴 구조는 유연한 갈고리 형태를 가졌으며 이를 이용하여 안정적인 주행과 높은 장애물 극복 능력을 동시에 구현함
- 세 개의 유연한 갈고리를 기반으로 한 바퀴의 형태를 시뮬레이션을 기반으로 최적화하여 성능을 향상시킴
- 주행 시에는 전진 방향, 장애물 극복 시에는 후진 방향으로 진행하는 기능 분리 설계 기법을 통하여 두 가지 상충된 목표를 동시에 달성