메뉴열기
IJPEM
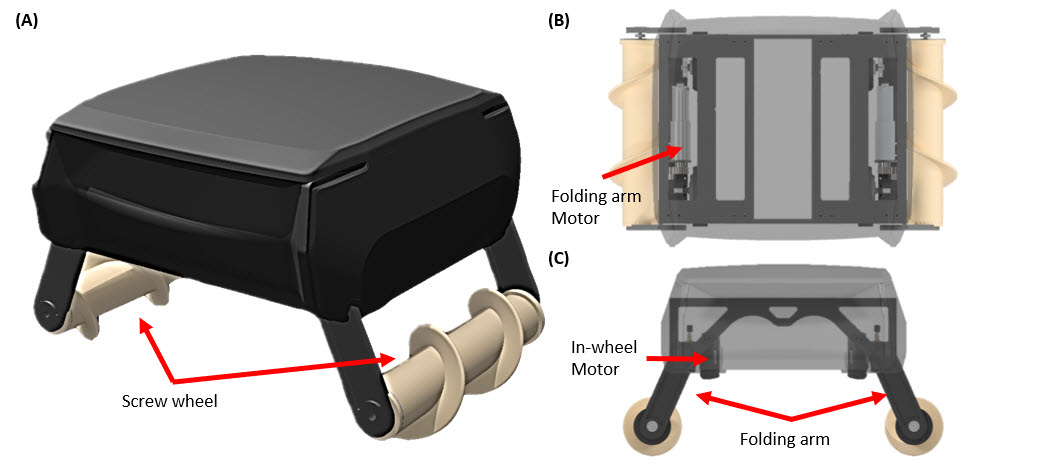
SPIRA: Screw Wheel-Based Mobile Robot for Switching Primitives
모래와 땅에서 잘 이동할 수 있는 배송로봇의 개발
서태원/한양대학교
스크루와 휠의 스위칭을 통하여 모래와 땅에서 동시에 잘 이동할 수 있는 로봇 플랫폼의 개발
스크루가 안쪽으로 숨겨져 컴팩트한 형상을 유지
모래에서 잘 이동할 수 있는 스크루 메커니즘의 형상 설계
시제품 제작 및 라스트 마일 배송 등의 시나리오 구현
논문 무료 다운로드
[Free Access Period: 24. 4. 3. ~ 24. 5. 31.]