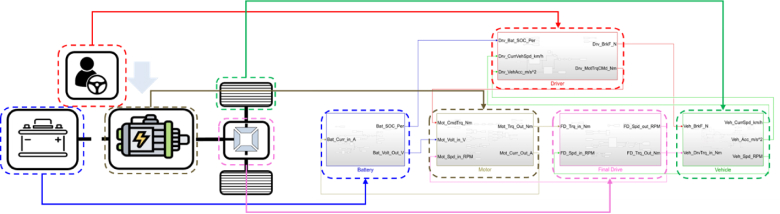
그림 1 EV simulator with battery, motor, final drive, vehicle and driver model
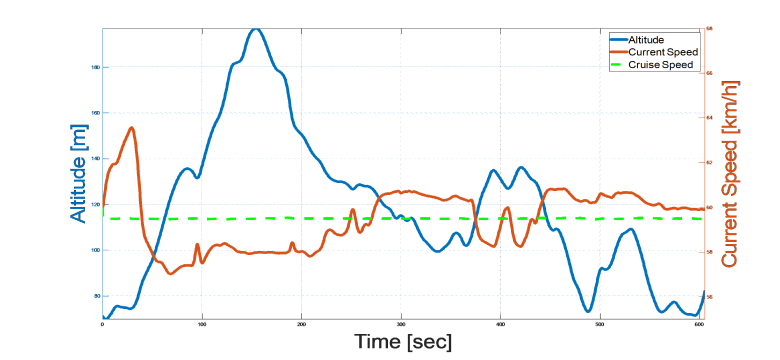
그림 2 Simulation result of the vehicle speed trajectory with slope based on DDPG algorithm