IJPEM
Improving Path Accuracy and Vibration Character of Industrial Robot Arms with Iterative Learning Control Method
ILC(.Iterative Learning Control)를 활용한 산업용 패널 이송로봇의 경로오차 개선
김효영, 김기현/한국공학대학교
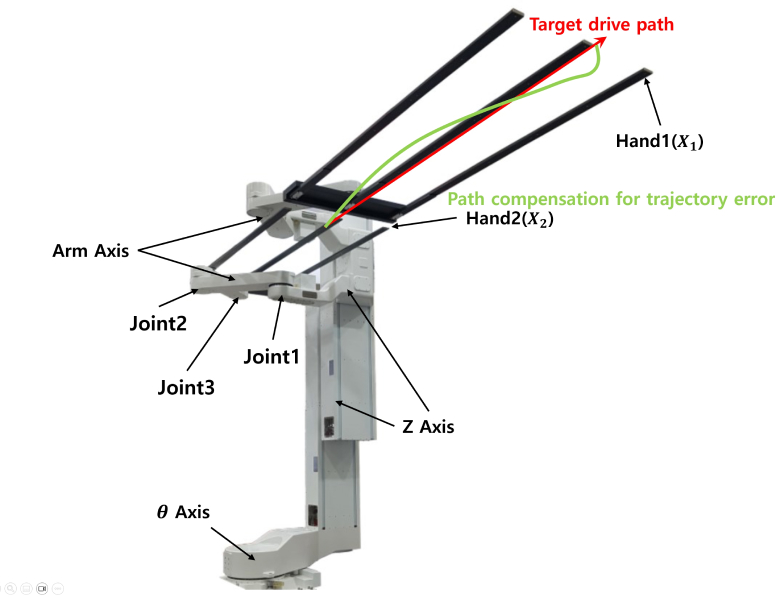
- ILC 알고리즘을 활용한 이송로봇 경로오차 개선
- 레이저 트래커로 측정한 데이터값을 학습데이터로 활용하여 기존의 SPD-Offline ILC 방식에 Time Scaling, Time Shift 알고리즘을 추가로 적용하여 경로오차를 개선함.
- 최적화된 ILC 알고리즘 파라미터 적용하여 알고리즘 적용 후 실험한 결과 90%이상의 RMS 경로오차가 감소됨을 확인 하였음.