IJPEM-GT
Expanded Position Dilution of Precision-based Optimal Calibration of the Industrial Robot Tool Center Point and Adaptive Three-dimensional Probe Development
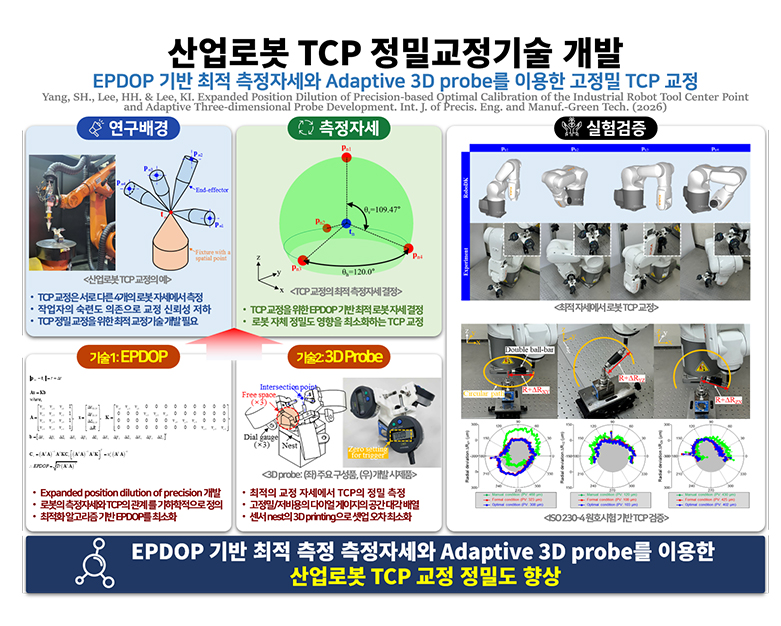
산업로봇 TCP 정밀교정기술 개발
이광일/경일대학교
- 산업용 로봇의 TCP 오차를 최소화하기 위한 EPDOP 기반 최적 정밀교정기술을 개발하여 공정 정확도를 향상
- 로봇 자세(configuration)에 따른 측정불확도를 분석하고, 최적 측정 자세를 선정하는 새로운 TCP calibration 방법을 제안
- 다양한 작업환경에서도 TCP의 고정밀 측정이 가능한 adaptive 3차원 프로브를 자체 개발하여 교정 신뢰성을 확보
- 제안 기술은 스마트팩토리, 정밀가공 및 로봇자동화 분야의 고정밀 산업용 로봇 운용에 활용될 것으로 기대